Nastavenie dvoch motorov Robus/Run na režim nadradenej a podradenej jednotky
Postup je nasledovný:
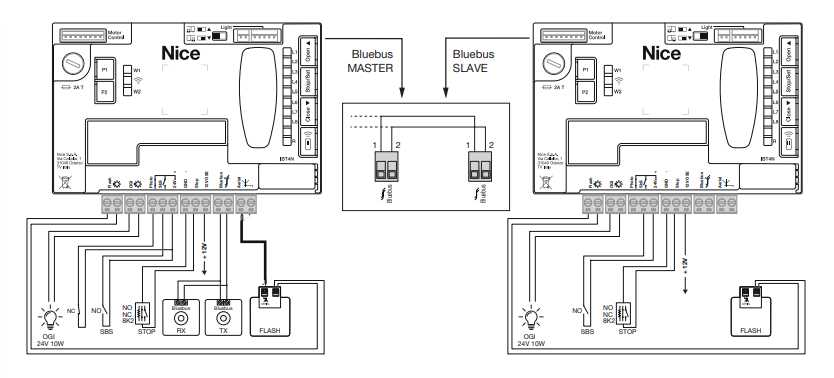
- Odpojiť pohony z napájania
- Prepojiť dvojžilovým káblom medzi svorkami BlueBus (ľavá dierka s ľavou dierkou, pravá s pravou).

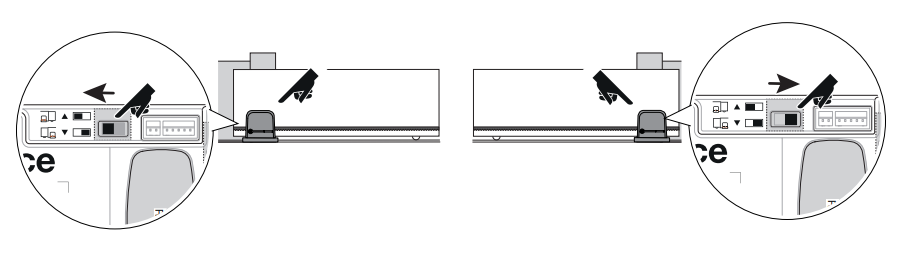
- Prípadne nastaviť voľbu smeru otvárania brány prepínačom na riadiacej jednotke.
- Zapojiť do napájania
- Nastaviť režim podriadenej jednotky na podriadenej jednotke (na každý krok máte 10 sekúnd):
- Stlačte a držte tlačidlo STOP/SET, keď sa rozbliká L1, tak ho pustite.
- Sedemkrát stlačte tlačidlo CLOSE, nech sa posunie blikajúca diódka na pozíciu L8.
- Jedenkrát stlačte tlačidlo STOP/SET, dióda L8 zmení frekvenciu blikania a potom zostane svietiť (resp. môže blikať L1+L2, alebo L3+L4).
- Hotovo.
- Vyhodnotiť pripojené zariadenia na podriadenej jednotke:
- Stlačte a držte OPEN a STOP/SET, keď sa rozbliká L1+L2 spolu rýchlo, tak pustite.
- Po chvíli doblikajú a hotovo.
- Vyhodnotiť pripojené zariadenia na nadradenej jednotke:
- Stlačte a držte OPEN a STOP/SET, keď sa rozbliká L1+L2 spolu rýchlo, tak pustite.
- Po chvíli doblikajú a hotovo.
- Vyhodnotiť pohyb krídiel na nadradenej jednotke:
- Stlačte a držte STOP/SET a CLOSE, keď sa rozbliká L3+L4 spolu rýchlo, tak pustite.
- Pohony by mali otvoriť a zavrieť brány, potom L3+L4 zhasne a hotovo.sa bude hýbať aj Slave.